


- 地址:
- 福建省泉州市南安市榕桥工业区
- 邮箱:
- info@sdrgzg.com
- QQ:
- 传真:
- 手机:
- 13655952326
《百变星君》讲述了阿星因得罪黑帮遭轰杀至粉身碎骨,后由教授将其改造为能变化多种形态的人造人复活,最终通过置入教授发明的芯片实现各种形态的变形,最终打败黑帮制造的铁甲威龙。
在人与智能机器的互动中,触觉感知是一种直观且令人惊叹的体验。想象一下,未来的机器人不仅能够理解你的语言,还能通过感知到你的触摸,反馈温度、压力甚至是轻柔的抚摸。然而,现有的人工皮肤设计在多功能性与可持续性之间仍然面临着困境——它们往往只能包含特定功能,除非改变成分,否则无法按照重构性能和改变功能。而且,在目前的设计中,人工皮肤即使能实现回收,也多为定向回收。爱游戏登录网页入口这意味着,材料只能被拆解成特定的用途,无法重新设计组合,实现功能为导向的传感器性质定制。这种局限性严重影响了未来智能机器的可持续发展与扩展性。
为了解决这一挑战,北京科技大学张跃院士和厦门大学廖新勤、陈忠等人提出一种基于材料基因表达调控的可变机器皮肤。相关研究以“Alterable Robotic Skin Using Material Gene Expression Modulation”为题发表在《 Advanced Functional Materials》上,展示了通过材料基因表达调控实现功能单元可重构的机器人皮肤设计。这种人工皮肤不仅具备功能单元的可重构能力,还能实现灵活的性质定制,使得机器人在结构和功能上更贴近原始自然的皮肤。
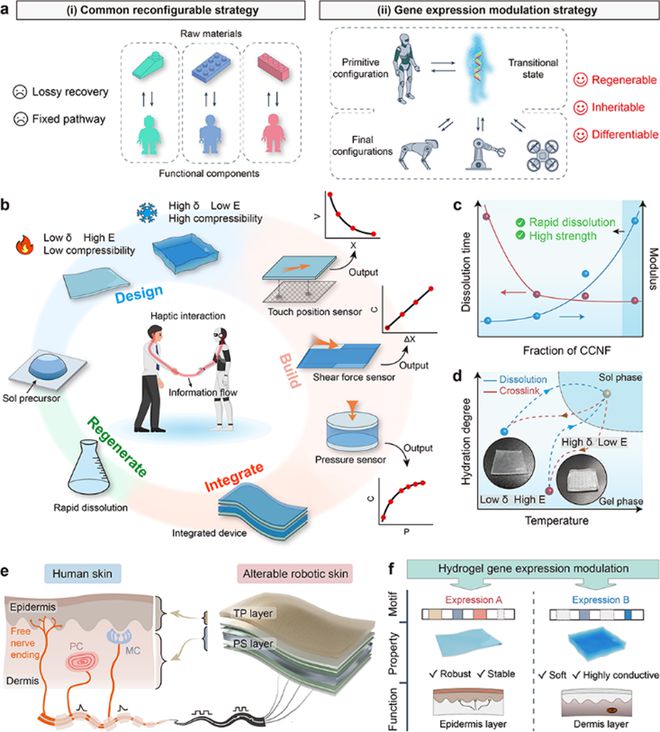
通过借鉴生物系统中的基因表达原理,研究团队设计了一种具有可变特性的机器人皮肤,其核心原理为:水凝胶材料基元通过热聚合和冷冻聚合等不同诱导条件下展现特异的功能属性,可分别作为仿生机器人皮肤的触摸定位功能层和压力感知功能层(图1a)。本文介绍了一个可持续的制造框架,包括设计、制造、整合和再生阶段。该框架允许功能电子元件的灵活回收和重建,以满足不断变化的需求,为人工智能系统带来显着的可扩展性和可持续性(图1b)。爱游戏登录网页入口与传统的功能单一的传感方案不同,这种设计允许源于组分的均质材料基元仅通过诱导条件变化从而激活多种触摸感知功能,比如位置、压力和动态触觉等。这种可变性显著提升了系统的多功能性和可持续性,降低了材料复杂性,并通过同质化结构的重新构建,实现了不同功能单元的定制化组合(图1e-f)。
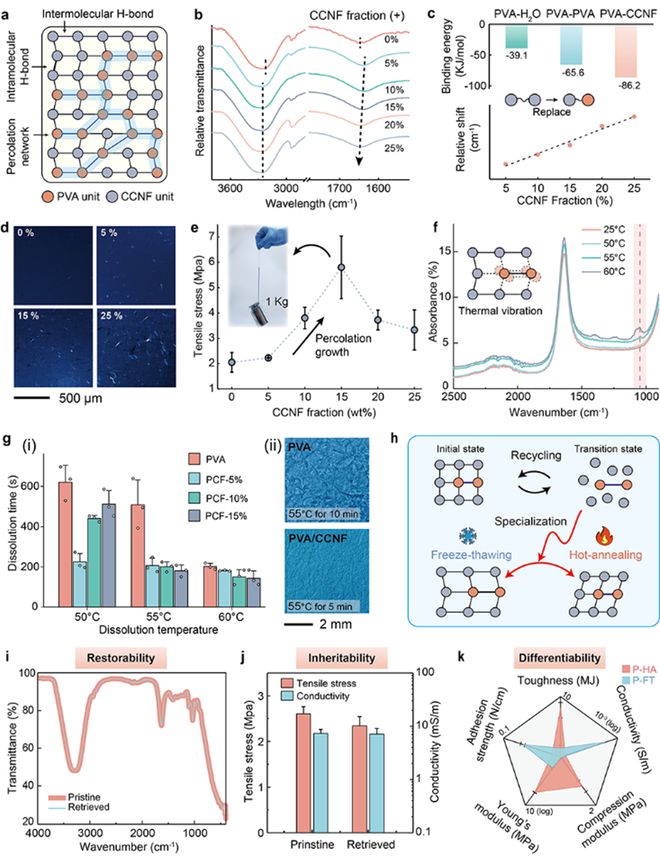
研究团队提出了一种交联-渗透复合水凝胶网络:通过在本征聚乙烯醇(PVA)水凝胶网络中引入第二相羧基化纤维素纳米纤维(CCNF)渗透网络来构建复合网络(图2a-d)。复合网络解决了一般可回收网络无法兼顾高机械强度和可回收便利性的难题。其中,纤维渗透网络可以在本征氢键网络内形成第二网络,提高整体的机械强度(图2e),且促进体系离子电导率;而且,羧基化纤维素表面的羟基基团可作为占位键爱游戏ayx官方网站,抑制PVA本征网络的硬化,获得低热水解温度(图2f-g)。基于水凝胶的机器人皮肤具有状态可复原、性质可继承和功能可分化的三个特点,建立了生物组织基因表达与人工系统智能制造之间的联系(图i-k)。
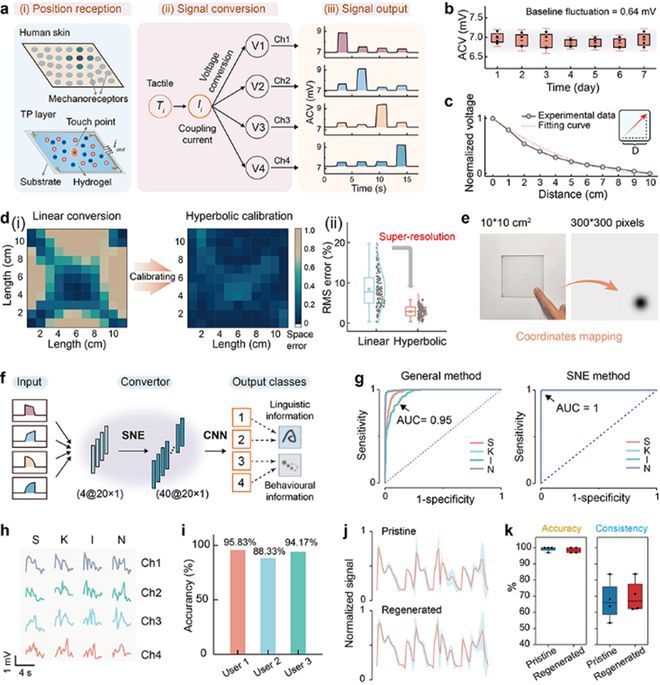
研究者展示了热诱导聚合水凝胶用作触摸定位层(TP层)的设计机制与性能测试。热诱导聚合水凝胶的高强度、高稳定性和低电信号漂移特性适用于机器人皮肤的触摸定位层。研究者采用四电极结构,结合位置矫正算法,实现了大面积、全区域的高精度触摸定位(图3a-c)。基于超快响应(10ms)和超低误差(均方误差低于3%)的触摸定位板展示了高精度触摸定位、普适性手写识别等功能(图3d-i)。在回收复用制造后,传感信号以及识别功能仍然保持(图3j-k)。
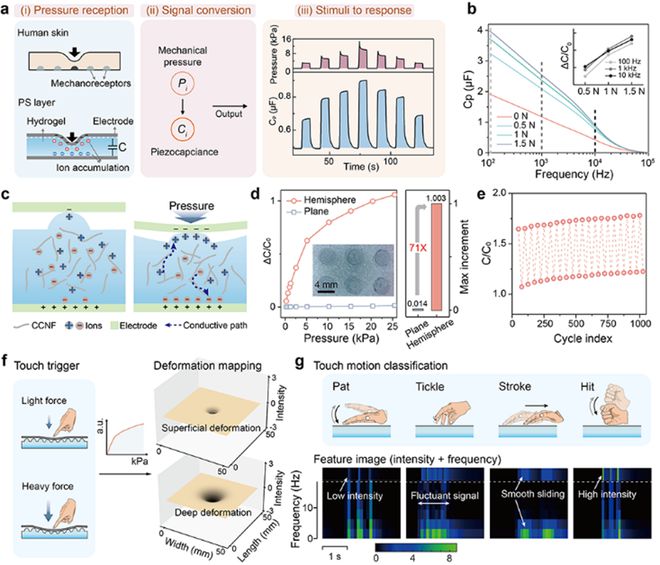
研究者展示了冷冻诱导聚合水凝胶用作压力传感层(PS层)的设计机制与其对不同压力的响应性能(图4a-b)。冷冻诱导聚合水凝胶的高离子导电率提升压力感知信号、柔软特性更能赋予PS层更贴近皮肤组织的体验。研究团队采用冻融交联的水凝胶层,结合半球形微结构设计,大幅提升了压力感应的灵敏度(图4c-e)。PS层不仅能够感知静态压力,还可以通过分析触觉动作的频率和强度信号,区分不同的触觉模式,如拍、打击、挠等,这在触觉互动中的应用潜力巨大(图4f-g)。
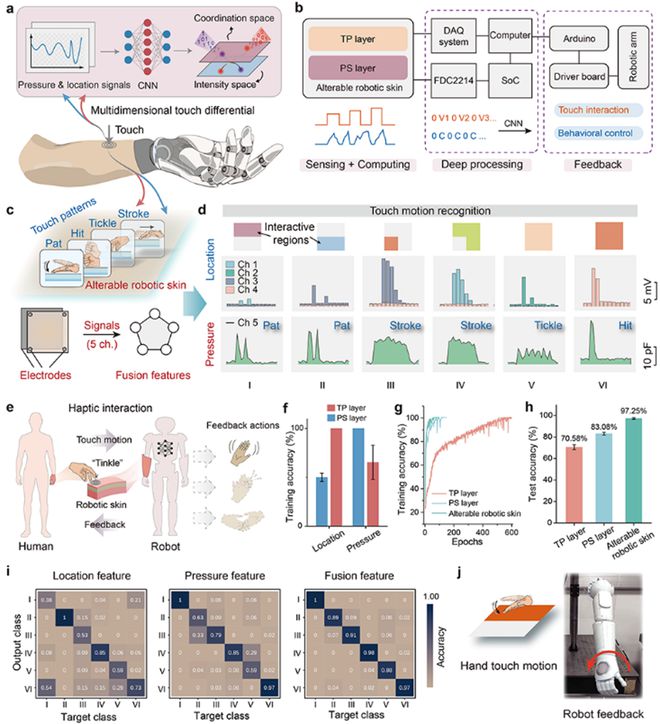
研究者开发了一套完整的触觉互动系统,以验证两种感知层的协同工作性能。可变机器人皮肤能够通过捕获多种触摸模式的触觉信息(如拍打、抚摸等),并基于这些触觉信号驱动机器人做出相应的动作(图5a-d)。传感模式集成实现融合触觉信息的高效识别,可用于基于触摸压力与位置的人机触觉交互。该系统仅需五个数据通道就可以传输全面积内的触摸位置和压力信息,通过结合位置信号与压力信号的多模态分析,显著提升了对复杂触觉运动的识别精度(高达97.25%)(图5e-j)。这一系统展现了可变机器皮肤在交互场景中的高效信息处理和反馈能力,在教育娱乐、智能机器人和仿生义肢等领域具有潜在应用价值。
研究者提出了一种基于材料基因表达调控的可变机器皮肤,能够在同一材料系统中实现多种功能的动态重构,如触觉定位和压力感知。通过纳米纤维复合水凝胶的交联设计,该皮肤不仅具备高机械强度,还具有快速溶解和重构的能力,实现了可持续循环使用。触觉定位层具备高精度的触摸位置检测,而压力感应层能够灵敏地感知并区分不同的压力和触摸模式。在集成模式下,该机器人皮肤基于精简数据却实现全区域内的协同感知。这种创新设计为柔性电子、仿生义肢和智能机器人领域带来了全新的应用前景。